AUTONOMOUS VEHICLE POSITIONING
As part of autonomous vehicle projects, manufacturers need positioning solutions that are centimeter-accurate, always reliable and economically viable.
BLUEFORCE AD TECHNOLOGY
SYSNAV has developed a toolkit for resilient positioning and localization of autonomous vehicles that combines inertial navigation and sensor data fusion to ensure availability, accuracy and integrity of positioning.
SYSNAV’s BlueForce AD merges sensor data from cameras, LIDAR, GNSS, odometer, HD cartography and SYSNAV’s core inertial measurement unit, using data fusion algorithms.
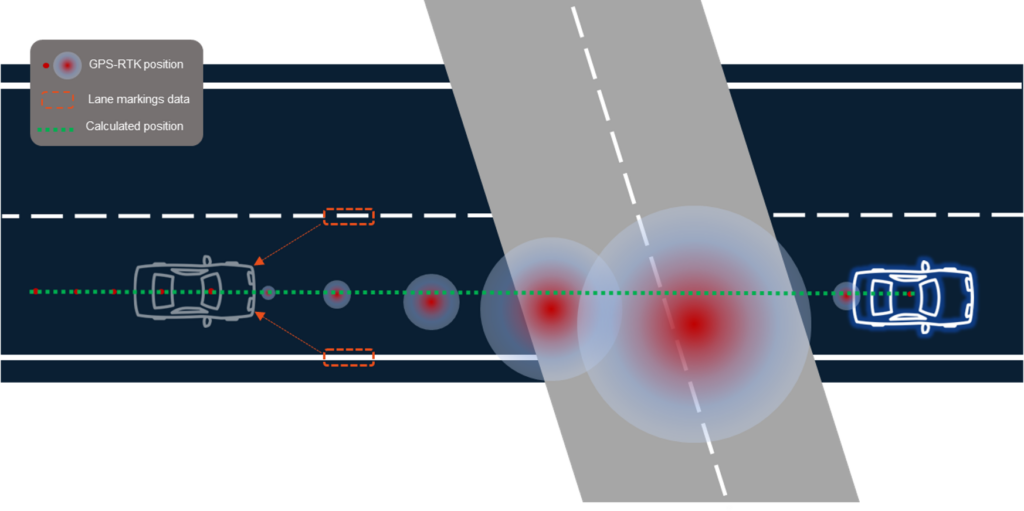
For instance, BlueForce AD regularly checks its estimated position by using external information such as lane markings detected by cameras and their position according to HD maps.
Upon the loss of all registration signals, SYSNAV’s BlueForce AD maintains a 30cm accuracy after 15 sec at a speed of 90 km/h (ie 400 m).

AD/ADAS APPLICATIONS
- Level 2 : extend hands-off lane-keeping ability
- Levels 3 and beyond : redundant, fail-safe positioning
GROUNDTRUTH DATA COLLECTION
- Open road groundtruthing : reliable positioning during data collection
- HD maps : correct inaccuracies of lane markings positioning

Contact us for further information on how to use SYSNAV’s BlueForce AD for groundtruth data collection.
BlueForce AD Leaflet
Please fill in the form to download the pdf leaflet :