LOCALISATION CENTIMÉTRIQUE POUR VÉHICULE AUTONOME
Dans le cadre des projets de véhicules autonomes, les constructeurs ont besoin de localisation redondante, pour conserver une très haute fiabilité en toutes circonstances. Le coût du système doit rester économiquement viable.
LA TECHNOLOGIE BLUEFORCE AD
SYSNAV a développé une version adaptée de sa technologie NAVIGATION MAGNÉTO-INERTIELLE* pour la localisation des véhicules autonomes.
Le système BlueForce AD pour véhicule autonome fusionne les données des multiples capteurs (caméras, GNSS, odomètre, cartographie HD, Lidar…) avec celles de sa centrale de navigation inertielle.
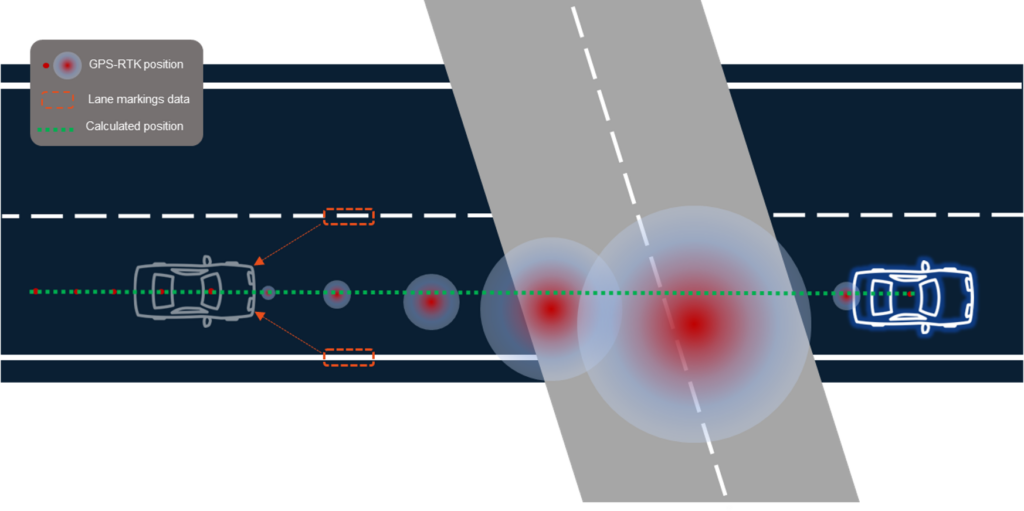
Par exemple, BlueForce AD utilise la reconnaissance visuelle des lignes sur les routes combinée à la cartographie HD pour un recalage latéral en position et estimer les biais des capteurs inertiels.
A 90 km/h et 15 sec. soit 400 m après la perte de tout signal de recalage, BlueForce AD fournit encore la localisation du véhicule avec une précision de 30 cm.

APPLICATIONS AD/ADAS
- Sûreté du positionnement pour les niveaux d’autonomie L3 et au-delà
- Augmenter le délai avant reprise du volant au niveau L2 (fonctions ADAS)
COLLECTE DE VÉRITÉ TERRAIN
- Recueil de vérité terrain sur route ouverte : assurer un positionnement fiable et continu des véhicules de collecte, pour pouvoir mieux exploiter les données, et harmoniser le référentiel des données issues de différents véhicules
- Cartographie HD : corriger les imprécisions ou erreurs de positionnement des marquages au sol

BROCHURE BLUEFORCE AD
Merci de remplir le formulaire ci-dessous :
*TECHNOLOGIE MAGNÉTO-INERTIELLE et/ou NAVIGATION MAGNÉTO-INERTIELLE sont des marques déposées par Sysnav. Tous droits réservés.